
Unternehmen
Leistungen
Unternehmen
Leistungen
ES 3.0:

Die Messwertbildung über die Messbasis von 50 cm (1) entspricht der beim ES 1.0 mit den Unterschieden, dass durch eine zusätzliche seitliche Abstandsmessung vom Messsensor zum gemessenen Fahrzeug (Abstand wird in das Beweisbild eingeblendet) auf die vollständige fotografische Erfassung des Messbereiches verzichtet werden kann, sich alle Fahrzeuge jedoch an einer vordefinierten Stelle nach dem Messsensor bei Bildauslösung befinden müssen.
Insofern ist bei diesen Messungen im Nachhinein zu prüfen, ob der seitliche Abstand korrekt im Abgleich mit dem Messaufbau eingeblendet wurde oder sich das gemessene Fahrzeug an dem besagten definierten Fotopunkt befindet.
Unter Umständen können die Messungen dann nicht beanzeigt werden, wenn diese beiden Auswertekriterien nicht erfüllt wurden. Außerdem ist auch hier der Messsensor zur Fahrbahnlage auszurichten (maximaler Fehler 1 km/h).
Bei diesem Messverfahren wird ein digitales Bild gefertigt und es blitzt rot.
ES 8.0:
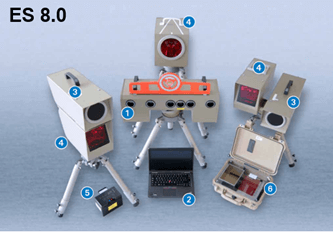
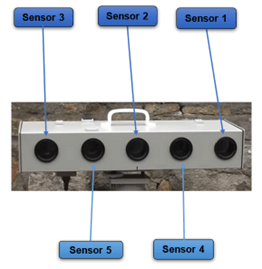
Den Kern der Anlage bildet der Sensorkopf mit 5 optischen Helligkeitssensoren. Drei der fünf Sensoren sind parallel zueinander angeordnet und dienen zur Geschwindigkeitsmessung. Zwei der fünf Sensoren sind dagegen leicht schräg ausgerichtet und dienen zur Abstandsmessung.
Die Gesamtlänge der Messbasis des Sensorkopfs, die durch die Sensoren (1) und (3) festgelegt ist, beträgt 500 mm, die der Teilstrecken (zwischen Sensor 1 und 2 bzw. 2 und 3) 250 mm. Diese drei Sensoren dienen zur Ermittlung von den Geschwindigkeitsmesswerten.
Die Sensoren vier und fünf, deren optische Achsen um ca. 0,4° jeweils in Richtung des mittleren Sensors (2) schräggestellt sind, dienen zur Messung des Abstandes des Fahrzeugs vom Sensorkopf. Durch die doppelte Ausführung wird eine eichfähige Abstandsmessung erreicht. Dabei wird ausgenutzt, dass die zeitliche Verschiebung des Signalverlaufs vom gesuchten Abstand abhängt. Mit Hilfe dieser Abstandsmessung kann Spurselektiv gemessen werden. Dadurch können Messungen die außerhalb des Fotos entstanden sind zweifelsfrei erkannt werden.
Bei der Durchfahrt wird in jedem der 5 Sensoren ein Helligkeitsprofil des gemessenen Fahrzeugs erfasst, digitalisiert und gespeichert. Aus den abgetasteten Helligkeitsprofilen der drei parallelen Sensoren wird der zeitliche Versatz ermittelt, um dann die Geschwindigkeit zu errechnen.
Das Messprinzip beruht bei dem ES3.0 auf einer „Weg – Zeitmessung“. Die Geschwindigkeit v eines Fahrzeuges ergibt sich dabei aus der Messbasis s und der Zeit t, in der das zu messende Fahrzeug die Messbasis durchfährt.