
Quelle: VITRONIC Dr.-Ing. Stein Bildverarbeitungssysteme GmbH
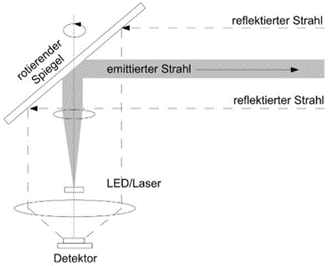
Die Erfassung der Fahrzeuge erfolgt mit einem scannenden LIDAR-Messkopf, der kurze Lichtimpulse in gebündeltem Strahl aussendet. Der Messstrahl tastet während der Messung einen definierten Fahrbahnbereich ab.
Der Strahl wird nach Reflexion an einem Objekt vom Empfänger des LIDAR delektiert und ausgewertet.
Quelle: VITRONIC Dr.-Ing. Stein Bildverarbeitungssysteme GmbH
Aus der gemessenen Signallaufzeit vom Sender zum reflektierenden Objektpunkt und zurück wird die Distanz zwischen Messkopf und angestrahltem Objektpunkt berechnet. Diese Messungen werden mit hoher Wiederholrate durchgeführt.
Die zeitliche Auswertung der Distanzwerte wiederum ermöglicht dann eine sehr genaue Geschwindigkeitsmessung.
Die Auswerteeinheit des Systems verarbeitet die Ergebnisse des LIDAR-Messkopfes.
Handlaser
GRUNDLEGENDES MESSPRINZIP
Lasergeschwindigkeitsmessungen erfolgen durch das Messen der Übertragungszeit von Infrarotlichtimpulsen zum Messobjekt und zurück.
Aus der Laufzeit des Lichts und der bekannten Lichtgeschwindigkeit/2 errechnet sich die Entfernung des Objekts.
Aus der Entfernungsänderung mehrerer Messungen und der dazwischenliegenden Messzeit errechnet sich die Geschwindigkeit.
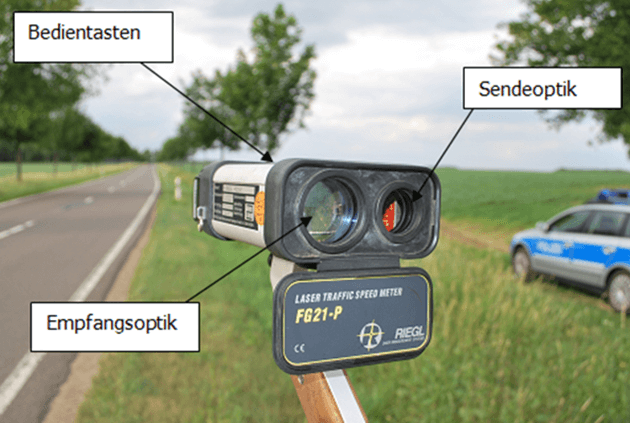
Quelle: Riegl Laser Measurement Systems GmbH
TraffiStar S350

Quelle: TraffiStar S350 - SV-Neidel.de
Die Geschwindigkeitsüberwachungsanlage TraffiStar S350 arbeitet bei der Messwertbildung mit einem horizontal scannenden Laser (LIDAR), die kontinuierlich kurzen Laserimpulse aussendet.
Hierbei werden Fahrzeuge bis zu einer Entfernung von maximal ca. 70 m mit einem Öffnungswinkel von ca. 50° in einer horizontalen Ebene fächerförmig abtastet, sodass hierbei ein Betrieb über mehrere Fahrspuren möglich ist.
Der ausgesandte Laserimpuls wird nach der Reflexion an einem Objekt vom Empfänger der Messeinheit detektiert.
Aus der gemessenen Signallaufzeit vom Sender zum reflektierenden Objektpunkt und wieder zurück, wird die Distanz zwischen Messeinheit und ausgestrahltem Objektpunkt berechnet.
Da die Richtung der jeweiligen Laserimpulse der Rechnereinheit bekannt ist, sind somit Entfernung und Richtung des reflektierenden Objektpunktes bestimmt.
Diese Daten werden mit hoher Wiederholrate neu erfasst und stehen für den Auswertealgorithmus als Rohdaten zur Verfügung.
Zur Messwertverarbeitung werden die Rohdaten im Messrechner zu Objekten bzw. Fahrzeugen zusammengefasst. Die Bewegung dieser Objekte wird im Erfassungsbereich im Rahmen eines mehrzielfähigen Trackings verfolgt.
Dabei werden für jedes detektierte Objekt in einem Messfeld von ca. 10 m Länge Daten zur Bestimmung des Geschwindigkeitsmesswertes gesammelt.
Hieraus ergibt sich eine mittlere Geschwindigkeit für das detektierte Fahrzeug, welche als Messwert an die Dokumentationseinheit als ausgegebener Messwert übermittelt wird.
Wird der hierbei ermittelte und auf einen ganzzahligen Wert abgerundete Geschwindigkeitsmesswert vom in der Dokumentationseinheit, der ROBOT SmartCamera IV, eingestellten Bildauslösegrenzwert erreicht oder überschritten, so löst die ROBOT SmartCamera IV mit dem, dem jeweiligen Messfeld zugeordneten, Bildsensor ein Foto aus.
Begrenzt durch die mögliche Bildwiederholrate können so mehrere Fahrzeuge im Erfassungsbereich, welche den Eingestellten Geschwindigkeitsbereich überschreiten, dokumentiert werden.
Die Zuordnungssicherheit der jeweils errechneten Geschwindigkeit zum zugehörigen Fahrzeug wird durch eine Markierung gewährleistet. Hierbei handelt es sich um eine, unter Berücksichtigung der verwendeten Objektivbrennweiten perspektivisch in das Foto eingeblendete Markierung, welche korrekt eingeblendet sein muss.